Сингапурские исследователи создали биомиметический материал из высокоэластичного полимера, имитирующий человеческую кожу. Он способен автономно самовосстанавливаться при механическом повреждении, имитировать осязание и определять приближение объектов.

Способность человеческой кожи реагировать на механическое воздействие обусловлена работой тактильных механорецепторов. Они собирают данные о давлении, растяжении и вибрациях, воздействующих на кожу, путём преобразования стимулов из внешней среды в нервные импульсы. Исследователи в области робототехники тщательно изучают процессы образования этих импульсов, чтобы воспроизвести их при производстве роботизированных протезов и промышленных роботов.
К настоящему моменту есть множество разработок, способных имитировать часть функций человеческой кожи. Например, в 2018 году швейцарские учёные разработали высокоэластичную ткань. В неё можно встраивать электроды, реагирующие на механические воздействия. В 2019 году исследователи использовали масштабную систему сенсоров, чтобы робот не раздавил человека в объятиях. В прошлом году американские исследователи создали систему мягких датчиков на основе силикона. Существуют также разработки на основе гидрогеля, пектиновых плёнок и других материалов.
Сингапурские исследователи решили пойти дальше и сделать материал, способный не только воссоздать работу тактильных механорецепторов, но и самовосстанавливаться после механических повреждений.
Для производства материала исследователи сначала высушили фтористые ПАВ (Fluorosurfactant, Zonyl FS-300) при температуре 70 °C. После растворили два грамма поливинилиденфторида (PVDF-HFP) в ацетоне и размешивали в течение четырёх часов. В раствор добавили 1,7 мл фтористых ПАВ и перемешивали ещё сутки. 46 мкл 1,3-диаминопропанама (DAP) капельно замешивали в раствор, в результате чего через полчаса он стал жёлтым. После исследователи добавили микрочастицы никеля (µNi) и смешали раствор во FlackTek при 2,5 тысячах оборотов в секунду в течение 2,5 минут. Смесь отлили в стеклянную форму 2,5 × 5 × 0,2 см (ширина × длина × высота). Материал нагревали на плите при температуре 70 °C до самовспенивания путём испарения ацетона (около 30 минут). Для сшивания полимера материал нагревали при температуре 120 °C в течение получаса.
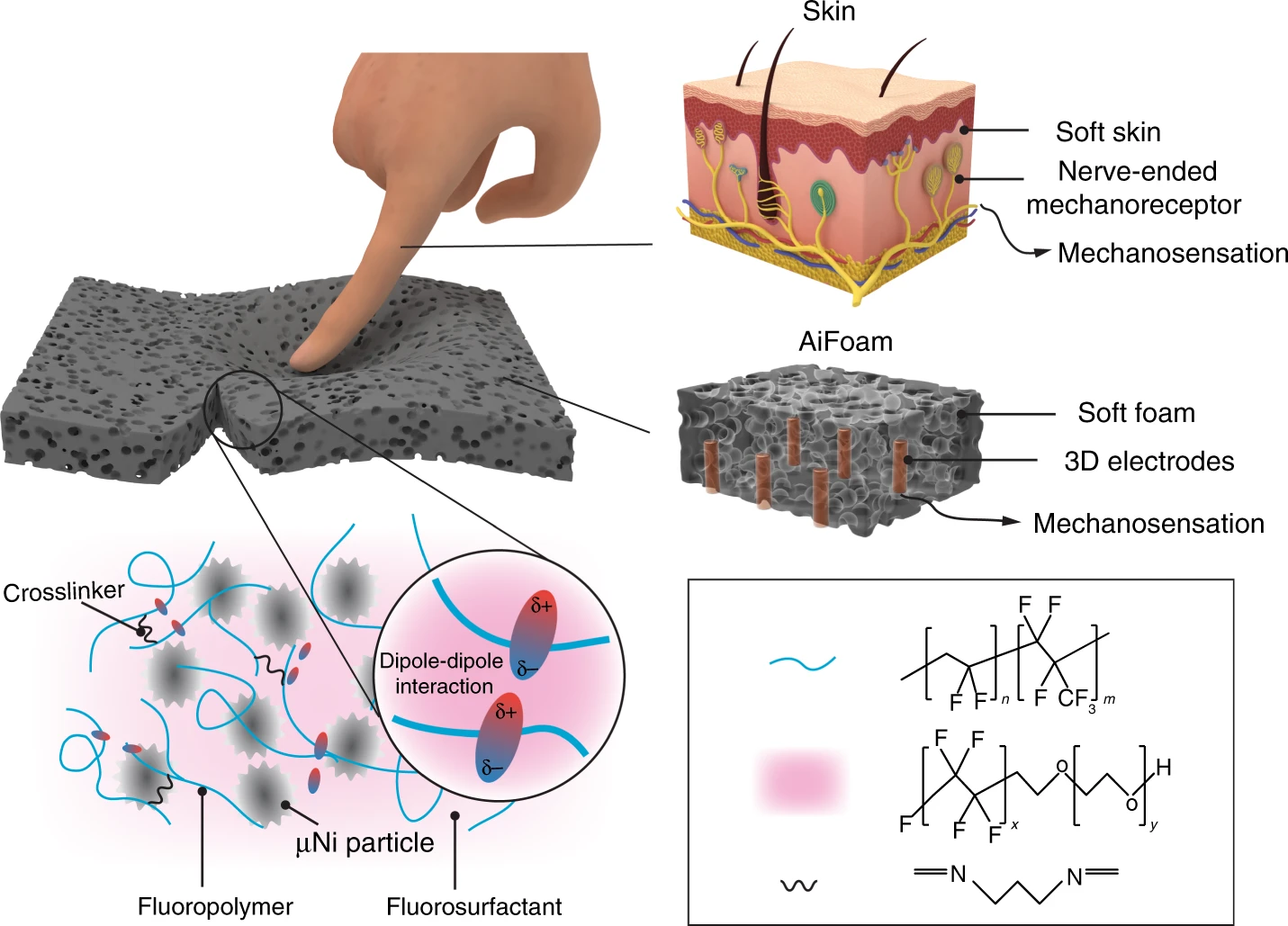
Слева изображена схема биомиметического материала AiFoam. Полимерные цепи (синие) сшиты DAP (чёрные), образущим основу из низкомодульного эластомера. Частицы микроникеля (μNi, серый) смешиваются с эластомером и образуют вспененный биомиметический материал. Диоль-дипольное взаимодействие между полимерными цепями и молекулами поверхностно-активного вещества задерживают вещество на поверхности и позволяют материалу самовосстанавливаться. Справа отображена схема датчика AiFoam, имитирующего соматосенсорную систему иннервации кожи человека (вверху).
Исследователи разрезали материал на кубики (1см2) и встроили в него трёхмерные электроды радиусом 75 мкм, припаянные к гибкой микросхеме. При приложении силы материал сжимается, что приводит к изменению формы электродов и измеримому изменению электрического импеданса. Полученный датчик определял направление и распределение силы путём обработки сигналов от электродов, показавших наибольшее изменение сопротивления по отношению к остальным электродам. Кроме того, фтористые ПАВ и частицы µNi обладают высокой диэлектрической проницаемостью, благодаря чему материал может работать как датчик приближения.
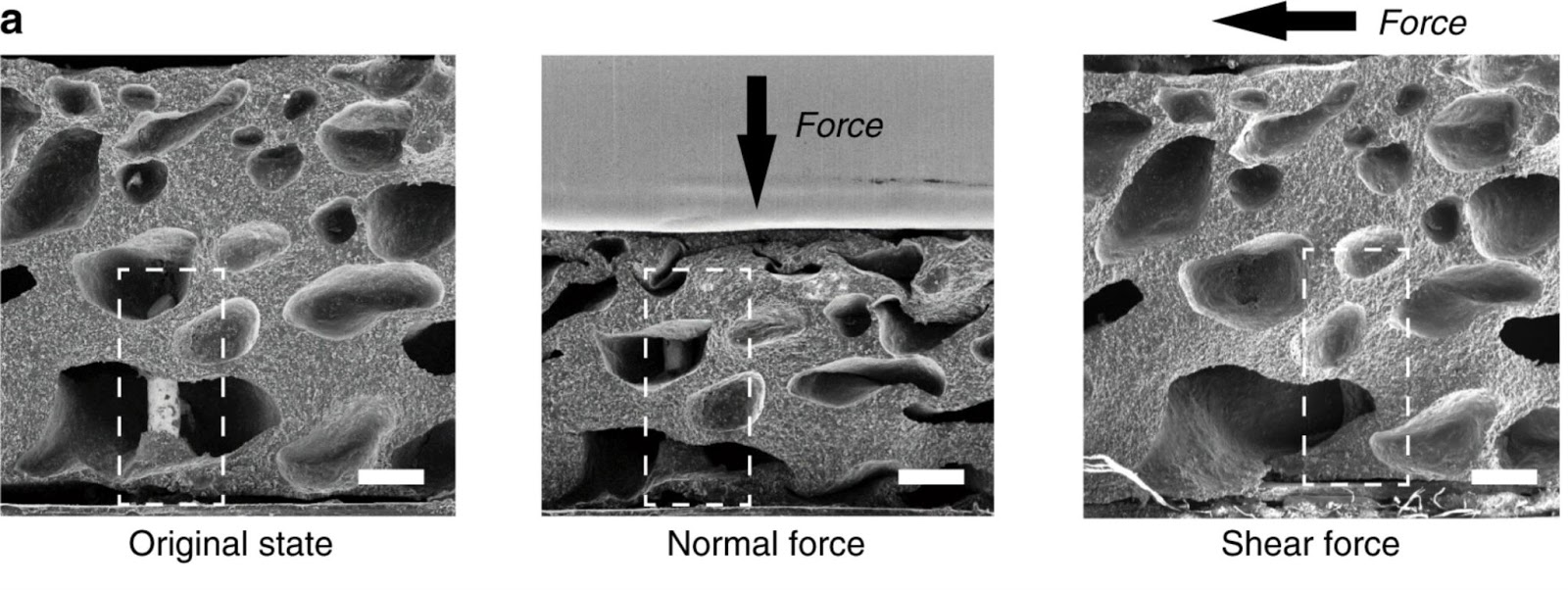
Изображение AiFoam, сделанное при помощи электронной микроскопии. Слева направо: материал в исходном состоянии, при нагрузке с нормальной силой, при боковой нагрузке. Пунктиром выделено положение трёхмерного электрода. Стрелки обозначают направление приложенной силы. Шкала 200 мкм.
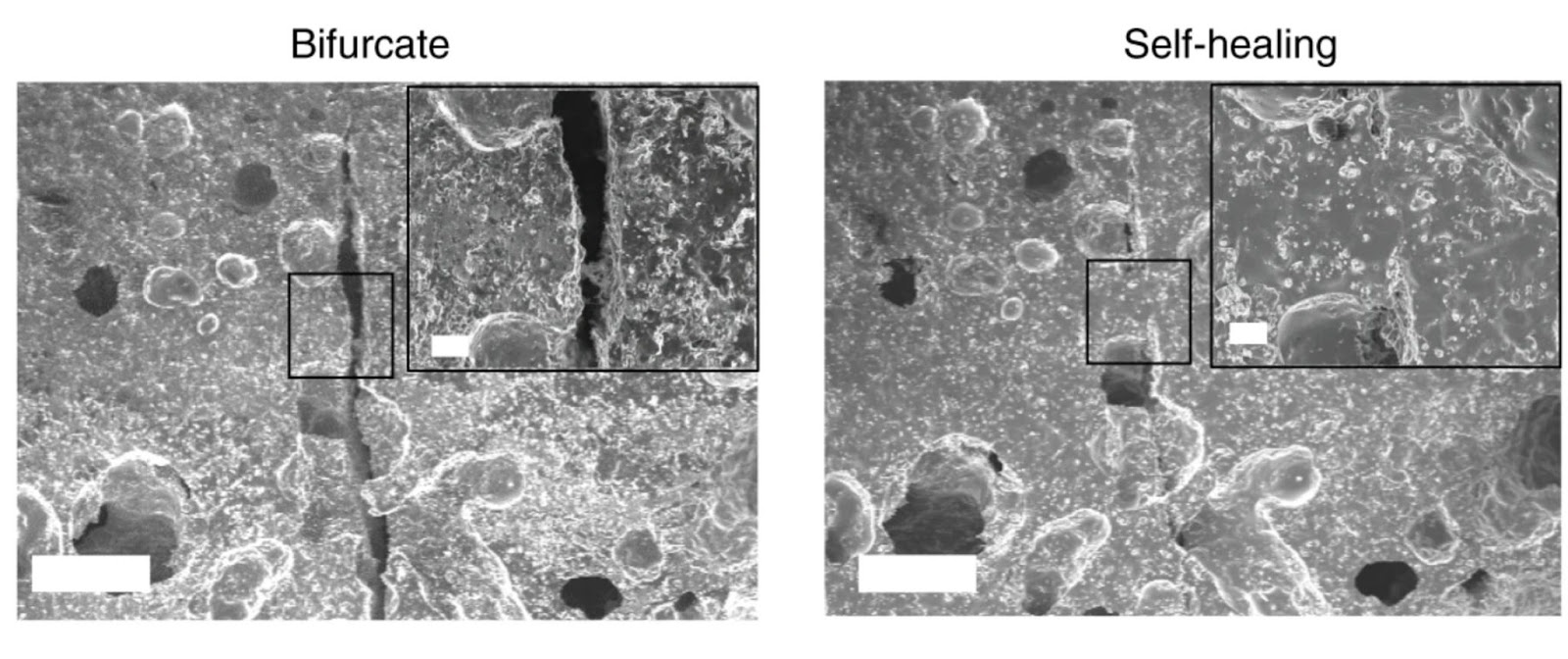
Во время испытаний материал продемонстрировал самовосстанавливающиеся свойства. Сопротивление AiFoam и его чувствительность к давлению полностью восстановились при температуре 70 °C в течение четырёх дней после повреждения. Также материал может растягиваться по длине на 230 % и на 180 % у образцов со сросшимися повреждениями.
Полученные датчики исследователи испытали на роботизированной руке. Как и ожидали учёные, рука смогла определить приближение человеческого пальца, рассчитать приложенную силу и определить её направление. Благодаря этому исследователи повысили точность и плавность движений роботизированной руки.
На данный момент авторы исследования ведут переговоры с несколькими компаниями по производству робототехники. Они рассчитывают внедрить технологию в промышленное производство в течение пяти лет.
Материалы исследования опубликованы в статье «Artificially innervated self-healing foams as synthetic piezo-impedance sensor skins» в журнале Nature Communications DOI: 10.1038/s41467-020-19531-0.